Industrial motion control is used to operate a variety of apparatuses, including gripping, transporting, and moving mechanisms on small machines, plus multi-axis robotics, large web handling systems, and much more. This overview explains the key concepts of motion control systems.
In an industrial automation context, the term “motion control” usually refers to using an electric motor, either a servo or stepper motor, to positively drive the position, velocity, and acceleration of a physical system. There are other motion control methods as well—pneumatics are economical, and hydraulics can provide the greatest force—but electric motors often provide the right balance of accuracy, speed, power, durability, and operating cost.
Motion control can be applied directly to driven equipment such as a roller, or via gearboxes and other mechanisms. Most motors are rotational in nature, but there are multiple ways to translate rotational motion into linear or other motions. Therefore, motion control applications can be as simple as operating a single gripper, or they can operate multi-axis robotic arms, and even more complex equipment with dozens of axes.
The following are some fundamental motion control concepts. For even more details, check out our motion control eBook here.
- Motor:
- Stepper motors are an economical way to achieve control for lower speeds and smaller force requirements, such as for 3D printers. They generally operate in an open-loop manner.

- Servo motors provide much higher speed, torque, and position/velocity/acceleration precision using closed-loop feedback control, at a generally higher level of cost and complexity.

- Stepper motors are an economical way to achieve control for lower speeds and smaller force requirements, such as for 3D printers. They generally operate in an open-loop manner.
- Drive:
Every servo or stepper motor needs a drive to power the motor.
- Motion controller:
A motion controller provides specialized functionality to operate one or more drives in coordination. The motion controller can be integrated within a drive, or a separate dedicated high-performance device, or many programmable logic controllers (PLCs) can capably perform this function. - Degrees of motion:
Motion control applications are classified by how many physical degrees of motion are controlled in coordination. Each motor to be controlled is called an “axis”, and for larger machines it is often necessary to coordinate many “axes”, potentially dozens, in conjunction with each other. For example, a gantry moving back and forth is a single-axis application, while a large printing press with many drives transporting and tensioning a continuous paper roll constitutes a multi-axis web control application. - Mechanisms:
Motion control systems may use gearboxes, cogged belts/pulleys, rack-and-pinion, ball screw, and other mechanisms as a way to multiply or divide motor speed, torque, and action to achieve the desired result.

- Sensors:
Sensors enable a motion controller to detect physical operation, supporting accurate control. The primary motion control sensor is a motor- or equipment-mounted encoder providing high-precision and -speed responses needed to achieve precise, rapid, and sophisticated motion control.

- Application complexity:
- Basic applications involve just a few axes of motion—usually three axes or fewer—and fundamental moves at moderate speeds. The CLICK PLUS stackable micro modular PLC provides this essential motion control functionality at an unprecedented low cost.

- Mid-tier applications require more extensive motion command sets and larger axis counts. The AutomationDirect Productivity line—Productivity1000 stackable micro , Productivity2000 micro modular , and Productivity3000 modular —and BRX stackable micro brick series PLCs can operate up to 12 or more axes.

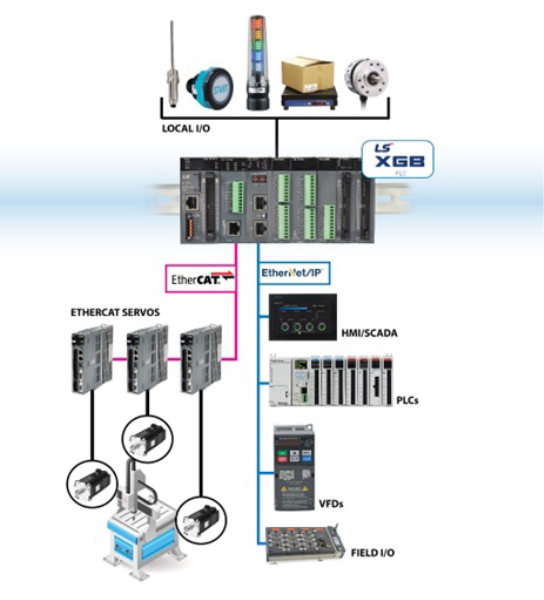
- High-performance applications operate at speeds and use sophisticated motion instructions beyond what a typical PLC can provide. The LS Electric XGB PLC, XMC programmable motion controller , and XGB PLC platforms provide industry-leading performance, flexibility, and cost advantages for even the most demanding applications up to 16 axis.

- Basic applications involve just a few axes of motion—usually three axes or fewer—and fundamental moves at moderate speeds. The CLICK PLUS stackable micro modular PLC provides this essential motion control functionality at an unprecedented low cost.
- Motion commands:
Motion control equipment is not one-size-fits-all for every application, and the complexity of motion control operations must guide component selection. The following are a few basic motion control concepts.- Homing and position verification refer to how the equipment learns or confirms that it is calibrated properly, usually by driving the motors to an expected position detected by a sensor.
- Position and velocity moves are the basic way that motors are operated at a fixed velocity continuously, or for a defined time duration or distance.
- Torque control is commonly needed, such as in a two-axis winding machine, where one axis might run in speed mode to turn a spool, while a second axis operates in torque mode to apply the proper amount of tension to the material as it is wound onto the spool. In this example, the tension would be unaffected by the changing diameter of the material on the spool.
- Linear or accelerating velocity changes are implemented to provide smoother operation and speed transitions to prevent payload slippage, tumbling, or drops.
- Trapezoidal and S-curve moves are a common way to linearly (or variably) accelerate to a target velocity, and then decelerate back to zero speed as the target location is approached.
- There are many other types of advanced motion functions and application-specific operations. The more advanced the motion controller is, the more likely it will be to include these functions.
- Communications:
Controllers, drives, and supervisory systems can be interconnected in several ways.- Hardwired input/output (I/O) signals can be used to trigger pre-programmed index moves on a single drive/controller and to indicate other basic information.
- Pulse train output (PTO) signals are high-frequency pulses for commanding motion, and some configurations allow a few axes to be coordinated.
- ASCII and Modbus offer a way to gain more functionality than using hardwired or PTO I/O.
- Modbus TCP/IP, EtherNet/IP, and other industrial Ethernet media and protocols have developed over the years to work in a multitude of industrial applications. While these industrial fieldbuses are fast enough and capable of handling large amounts of data, they do have speed limitations and are usually not suitable for providing registration and multi-axis coordination.
- The Ethernet for Control Automation Technology (EtherCAT) protocol is a preferred and popular option for motion control over Ethernet. It differs from other industrial Ethernet fieldbuses because it is designed to deliver deterministic cycle times, which are essential for maintaining accurate synchronization among all communicating devices in high-performance applications.
{kind=link}
Putting motion control into action
The AutomationDirect website offers a comprehensive selection of motion control motors, drives, controllers, PLCs, mechanisms, and many other accessories and sensors.
Selecting the appropriate motors, drives, controllers, and more for a complete motion control solution can be daunting. AutomationDirect understands this challenge, and in addition to assembling a wide-ranging portfolio of products, we created user-friendly online selection tools to help guide the process. Here are a few helpful links:
- Stepper selection: https://www.automationdirect.com/selectors/steppers
- SureServo2 selection: https://www.automationdirect.com/selectors/sureservo2
- LS Electric servo selection: https://www.automationdirect.com/selectors/ls-servo
- Motion control system builder: https://www.automationdirect.com/systembuilder
- Servo system selector chart
Check out this link for videos of many different motion control elements in operation.