While PROFINET and EtherNet/IP are among the most well-known industrial Ethernet communication protocols in North America, there are compelling reasons to choose EtherCAT for your next motion control or automation design.
By Chip McDaniel, AutomationDirect
For new industrial automation installations, as well as retrofits and upgrades, Ethernet adoption continues to grow as traditional fieldbus technology implementations decline (Reference 1). This trend is clearly visible to designers and engineers in the industrial sector, who now have many types of Ethernet-enabled controllers, instruments, and other devices available to them, along with a growing list of Ethernet media choices (conductors, connectors, switches, and more) to facilitate installations in challenging environments. Furthermore, Ethernet Advanced Physical Layer (APL) and Single Pair Ethernet (SPE) are making it even easier to install and retrofit Ethernet connectivity throughout process and discrete applications.
Choosing the best industrial Ethernet communication protocol for a given application is not a one-size-fits-all proposition, however. Each protocol has various characteristics which must be evaluated based on the requirements of the application, and no protocol is clearly better than all the others in every case. In fact, many target devices may only be available with support for one or two protocols, so that already constrains the choice. Furthermore, it is possible to use more than one protocol in an application, sometimes on the same physical network.
This article looks at why EtherCAT may be a good fit for your next project.
Communication protocol frontrunners
There are several industrial Ethernet protocols available, although the top three hold almost 70% of the market share. The top two by this metric are PROFINET (with strong adoption in Europe and a growing presence in Asia) and EtherNet/IP (the leading option in North America). Rounding out the top three is EtherCAT, which is most common in Europe but is seeing increasing use in North America and Asia. Because EtherCAT offers the exceptional speed, efficiency, determinism, and scalability needed for high-performance motion control applications, many designers perceive it as an inaccessibly complex and costly option.
Certainly, each EtherCAT device needs specific Ethernet hardware on-board to enable the on-the-fly processing essential for high-speed communication, so devices with this protocol are somewhat less common. But many motion control devices such as servo and stepper controllers, and variable frequency drives (VFDs) do include an EtherCAT adapter on-board or as an option to take advantage of its speed, deterministic performance, and simplified control architecture. In addition, various sensors, including encoders commonly needed for motion applications, are also now available in EtherCAT versions, as well as distributed input/output (I/O) options.
EtherCAT advantages
EtherCAT supports the most common physical topologies, including linear/ring, star, and tree. In fact, many EtherCAT devices incorporate two ports, making it easy to design a linear/ring architecture with each device daisy-chained to the next, and no additional switches needed. If the ring is physically closed/completed, then for some implementations redundancy can be enabled with automatic recovery from a single cable break or failure within less than 15 microseconds.
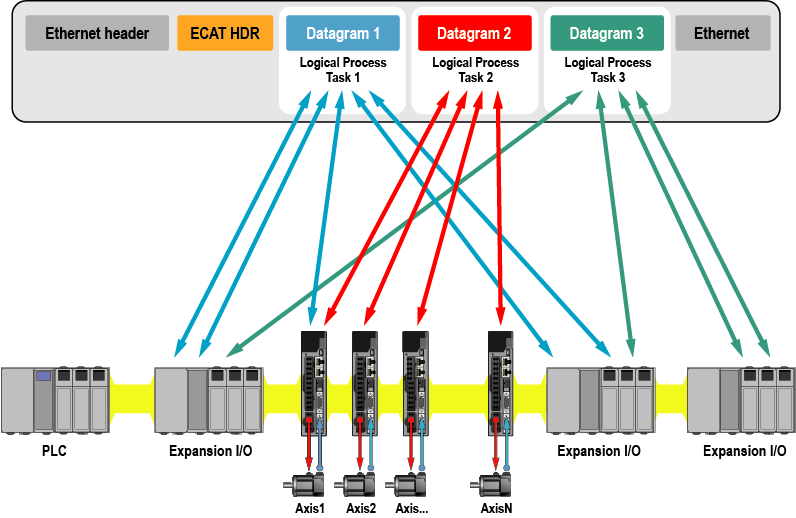
Equally important is that the protocol operates in a logical ring topology, where a single master device initiates a data telegram (containing multiple datagrams) which traverses through slave devices (network nodes). Each node handles the telegram rapidly, reading node-specific data, inserting data when needed and then transmitting it on, leading to deterministic cycle times on the order of 1,000 microseconds or less (Figure 1).
An EtherCAT network can support many thousands of nodes, but most practical applications will have just a few or a few dozen nodes to support best performance. For motion applications, the number of axes is determined by the controller, and could be just a few up to 16 or more.
So the question becomes, what puts a thumb on the scale to weigh EtherCAT as the best choice for any given application?
Commonplace devices, streamlined installs
EtherCAT is not just for high-performance motion control, with two main factors making EtherCAT a compelling choice for automation designs (Figure 2):
• Widespread availability of EtherCAT-enabled stepper drives and VFDs—both less costly than servo alternatives—and also encoders and I/O options
• Streamlined linear/ring network installation, with simple CAT5 connections handling the majority of the wiring.
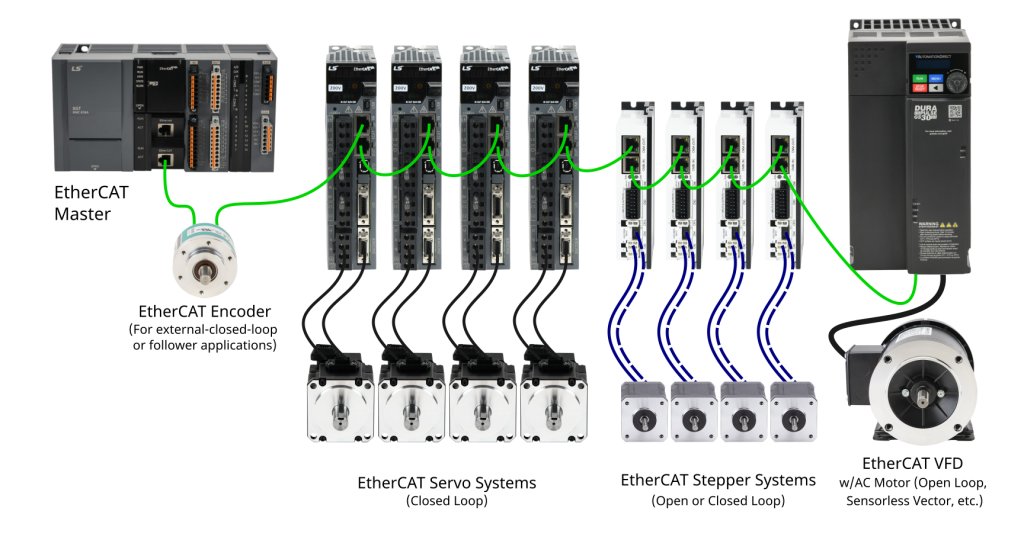
For applications with servo motion control, EtherCAT is a natural fit. But whether or not servos are involved, the wide availability of EtherCAT-enabled stepper drives and VFD drives mean that designers can choose the proper level of precision/feedback and the most cost-effective technology for each axis. Similarly, because devices like encoders and remote I/O hubs are available with EtherCAT, designers may find that all the devices they need for a given machine or system can be handled on an EtherCAT network for simplified control.
The ability to daisy-chain multiple EtherCAT devices using simple Ethernet patch cables, without interposing network hardware, massively streamlines installations. This is especially the case compared with older motion control designs requiring dozens of control, handshake, and alarm signals to be hardwired between controllers and drives. Often the only remaining hardwired control signals might be overtravel inputs and possibly a home sensor, if needed. Eliminating so many connections not only saves on installation labor, but also on subsequent testing and support. In addition, many EtherCAT-enabled drives incorporate Safe Torque Off (STO) technology, providing reliable emergency-stop capabilities with simplified wiring.
Give EtherCAT a look
EtherCAT is not only for the highest-performance industrial control applications. The ready availability of other EtherCAT-enabled devices—including cost-effective stepper drives and VFDs—combined with streamlined installation due to the linear/ring network using standard Ethernet cables, makes EtherCAT a leading choice for many automation applications.
References
Reference 1: https://www.hms-networks.com/news/news-details/27-05-2025-hms-networks-report-industrial-trends-2025
All figures courtesy of AutomationDirect
About the Author

Chip McDaniel works in technical marketing for AutomationDirect and is a graduate of Georgia Tech. His decades of experience in the industrial automation field include designing, building and commissioning multi-axis servo systems, as well as the marketing of a wide range of automation products.