These engineering students relied on an industry-proven automation platform and other products, to rapidly create a reliable rocketry ground test system.
Byline: Jayden Sorensen, Electrical Lead
As rocket companies have advanced from using single-use, expendable rockets to now achieving landing and reuse of the vehicles, much of the cost of transporting people and payloads into space has shifted away from the hardware and toward the propellants fueling the engine. The increase in launches has correspondingly escalated demand for rocket fuel. In a time when regulatory and societal forces are moving away from petroleum-based fuel products, this pressure has opened the door for the exploration of more sustainable fuel sources for aerospace applications.
To address this, our team of 6 students at the University of Calgary set out to study the potential of biofuel as a renewable alternative to traditional rocket fuels. Bio Rocket, which began as an engineering capstone project, is developing Proteus, Alberta’s first student-developed liquid-fueled rocket. The goal was to design and build the rocket, as well as the supporting testing and ground control infrastructure, both to assess the performance of bioethanol as a fuel and to gain hands-on technical experience far beyond what’s possible in the classroom, helping team members gain skills that are urgently needed in Canada’s growing aerospace sector (Figure 1).
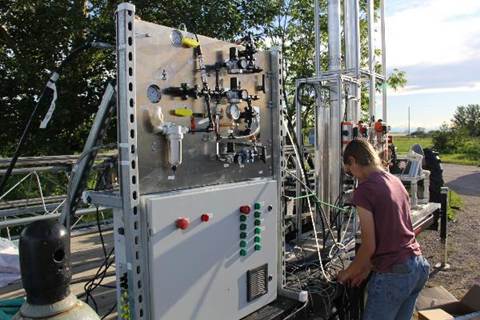

Figure 1: The Bio Rocket team developed this ground test system to support their Proteus rocket, relying heavily on industry-proven automation and other components to create the mobile, modular, and scalable solution.
As a student team, Bio Rocket is primarily reliant on industry support and sponsorship to achieve project goals. The endeavor began in September 2024 and was to last just 8 months, so the small team realized that achieving such a short development timeline would require prioritizing readily accessible and industry-proven components wherever possible.
Where mechanics meet controls
Proteus weighs in at 123 lb (56 kg) and is 14 ft (4.3 m) tall, with a diameter of 6 in (15.2 cm). It is designed to reach an altitude of 10,000 ft (3048 m) while reaching a top speed of Mach 1 (1235 km/h), before being safely recovered by a dual-deployment parachute system. The rocket will be fueled and launched from the mobile ground test system.
Mechanically, the team’s requirements were captured through piping and instrumentation diagrams (P&IDs)—much like an industrial manufacturing process—which provided the necessary definition to develop control sequence requirements for the automation platform. Designing a rocket is, by itself, a huge undertaking—it literally is rocket science—but the technical challenges go beyond the rocket alone. To accomplish the mission, a battery of tests would need to be conducted using the ground test system, to fully characterize the performance of the engine and provide ground-based support for flight operations. A test system for automating the high-pressure fluid system and logging data was needed.
The test system would need to be flexible and extensible to adapt to evolving system requirements. It would control around two dozen actuators and receive data from dozens of sensors including pressure transducers, thermocouples, and load cells. While all of this was to be remotely operated from over 1 km away, safety was still of critical importance and would require visible safeguards to be in place such as a keyed lockout, an emergency stop, system power indication, and state indicator lights.
Agile automation hardware supports rapid development
A programmable logic controller (PLC), commonly used for demanding industrial operational technology (OT) applications, was the clear choice for handling the necessary automation tasks, because it allows for easy scaling, such as the addition of sensors or actuators, for each design iteration while providing reliable, deterministic sequencing. Some team members were already familiar with PLCs, however no one was an expert in classic ladder logic programming, so an option using more contemporary information technology (IT) languages was preferred.

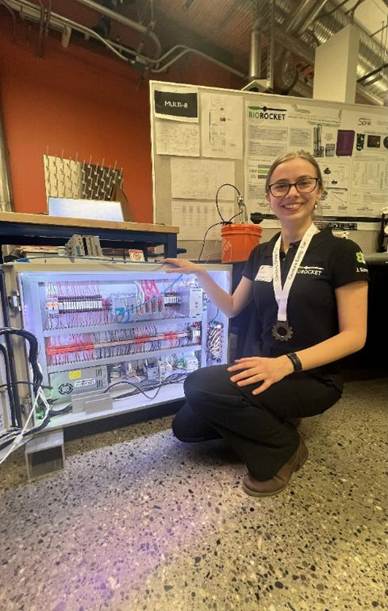
After some investigation, the team chose an AutomationDirect P1AM-200 ProductivityOpen Arduino-compatible controller for the ground test system controls. While it would be tempting to use an inexpensive hobbyist-grade microcontroller, that would not be the right answer for such a demanding application. The ProductivityOpen platform is hardened into a form factor appropriate for industrial-grade use. Moreover, this controller is compatible with robust and proven AutomationDirect Productivity1000 series expansion cards, supporting a huge variety of input (I/O) options, including thermocouple modules, relays, and analog inputs. Even with this industrial pedigree, this platform enabled the team to program within the Arduino integrated development environment using C++ rather than ladder logic, resulting in easy, flexible programming with quick iteration in a language with which students are more readily familiar (Figure 2).
In addition to the PLC and I/O modules, the team sourced a number of other components from AutomationDirect’s wide range of products, including power supplies, wiring and connection solutions, and PLC accessories (terminal blocks, fuse holders, buttons, LED indicators, and wire duct) critical for designing and building the control panel (Figure 3).

Overall, the system drives over 20 solenoids (to operate valves on the ground test system) using relay outputs, with some interposing relays. Analog inputs and thermocouple modules are connected to field instruments to read pressures, temperatures, and mass during operation. Some of the automation is simply remote control initiated by the users. But the most critical sequences are automated completely in the PLC with appropriate interlocks.
Team members found the automation platform easy to learn, especially because there were ample documentation and informational videos available from the supplier website. They had the same experience applying instruments and control panel hardware to build the system. As the system requirements evolved, the team was able to order new modules and additional components with lead times of only a few days, critical to keeping pace with the project. The team immensely valued AutomationDirect’s extensive catalog, easy online ordering with clear indications of stocking levels, and quick shipping to Canada.
Commissioning under control
The Proteus ground test system is designed as a modular, portable platform mounted on a trailer. This approach lets the team test wherever facilities are available and keeps the electrical system organized as a single unit consisting of the control panel, power distribution, instrumentation, and the interfaces needed for the ground test system. Trailer operations are supported with generators, including a smaller inverter-based generator dedicated to the controller and control electronics, and a mobile air compressor for pneumatic actuators.
For measurements that require higher sampling rates, the team uses a separate data acquisition (DAQ) module. A Raspberry Pi hosts the backend software and database used for logging and processing sensor data, and it communicates with the PLC over Ethernet, acting as a client while the PLC exposes a server interface for command and telemetry exchange.
At mission control, operators access a web-based graphical interface hosted on a laptop, which connects to the Raspberry Pi over the same Ethernet network. This interface provids real-time monitoring and command capability, allowing the team to maintain situational awareness and control the ground test system remotely. In addition to sensor telemetry, live camera feeds are streamed to mission control, providing visual confirmation of system status during operations.
A rocket test system cannot be commissioned in a single leap. The team validated the system through incremental testing and verification. Dry testing validated wiring, logic, and basic sequencing. Wet testing rehearsals then assessed valve behavior and sensor response under fluid flow without committing to full engine operations. As the campaign progressed, the same control platform supported static firing and component qualification work.
Carrying momentum beyond the capstone
The project began in September 2024 and won 1st place at the Schulich School of Engineering Design Fair in April 2025. By August 2025, the team had completed the first static fire test of a student-developed liquid rocket engine in Alberta (Figure 4). In doing this, Bio Rocket has completed the fastest development of a liquid rocket engine in Canada.
Over the course of the summer test campaign, the ground test system controls were tested and proven through several high-pressure leak checks, multiple engine tests, and several valve qualification tests. The use of AutomationDirect’s components enabled the team to realize the adaptable and reliable system they set out to build within the project’s aggressive timeline. The team was grateful for the user experience at AutomationDirect.
Proteus may have begun as a capstone project for an engineering program, but the project kept evolving. Now, the longer-term goal is to keep the project alive and continue pursuing the promise of a sustainably fueled rocket engine. Currently, the Bio Rocket project is transitioning to become a non-profit organization, the Western Canada Aerospace Initiative, dedicated to expanding aerospace innovation across Western Canada.
The Bio Rocket team has already identified several features they would like to include in future versions of the ground test system, including more sensors and real-time valve state feedback to allow for better control and monitoring of the system. Additionally, they would like to explore greater automation of component-level testing and manufacturing activities, and incorporate other automation, mechanical, and motion products offered by AutomationDirect. By leveraging AutomationDirect’s selection of tools and components, the team is confident that their system will be easily expanded upon to meet future needs with minimal development time. The target for a full launch of Proteus is summer of 2027.
All figures courtesy of Bio Rocket
Author Bio

Jayden Sorensen, the Electrical Lead for the Bio Rocket team, recently completed her bachelor’s degree in electrical engineering at the University of Calgary and is now serving as the Executive Director at the Western Canada Aerospace Initiative. She and the other student team members (Figure 5), are currently transitioning their project into a non-profit organization to formalize continuity, improve knowledge transfer, and pursue grants so future cohorts can build on what has already been proven.