The 2007 Urban Challenge, held by DARPA, is the third in a series of races for unmanned vehicles. The Defense Advanced Research Projects Agency (DARPA) is the central research and development organization for the Department of Defense (DOD). DARPA is using the series of races to foster advances in technology for autonomous vehicles to meet DOD internal goals, and due to a congressional mandate. In 2001 the US Congress mandated that, by 2015, one-third of operational ground combat vehicles be unmanned.
 The first two Grand Challenges were races across the desert, where vehicles had to overcome fixed obstacles and rugged terrain while navigating a course defined by GPS waypoints. A prize of one million dollars went unclaimed in the 2004 race, with no vehicles completing the course. The prize was increased to two million dollars in 2005, and five teams completed the 132 mile course. Stanford University claimed the first place prize money with the best time of 6 hours and 53 minutes.
The first two Grand Challenges were races across the desert, where vehicles had to overcome fixed obstacles and rugged terrain while navigating a course defined by GPS waypoints. A prize of one million dollars went unclaimed in the 2004 race, with no vehicles completing the course. The prize was increased to two million dollars in 2005, and five teams completed the 132 mile course. Stanford University claimed the first place prize money with the best time of 6 hours and 53 minutes.
Team Mojavaton was one of 23 finalist teams in the 2005 event. They had a strong entry; their vehicle, dubbed “The White Knight”, actually passed 10 other vehicles. This was an impressive achievement given the race format, which used a staggered start. Unfortunately, the vehicle suffered a mechanical failure in the throttle control, and coasted to a stop in the middle of the road, still on course, with all of the other systems functioning.
On May 1, 2006 DARPA announced a third event, the Urban Challenge, to be held in November 2007. Teams will build an autonomous vehicle able to complete a 60-mile urban course safely in less than 6 hours. The first two Grand Challenges focused on the development of autonomous vehicles operating in an off-road environment with very limited interaction with other vehicles. The Urban Challenge extends this concept to autonomous vehicles that can safely execute missions in a complex urban environment with moving traffic. DARPA’s authority to award monetary prizes was questioned late last year,
but there have been published reports that there will be prize money comparable to what was awarded in the previous Challenge.
The Lights Are On, But Nobody’s Home

Challenge vehicles are production cars or trucks modified with computer systems, a variety of sensors, and GPS equipment designed to operate without human intervention. Unlike some robotic vehicles, such as the Mars Pathfinder or the Predator drone aircraft, these are not remote control vehicles. Once the vehicles are switched into autonomous mode, they are completely controlled by onboard computers and sophisticated software.
No one is allowed to ride in the car and humans can only follow and/or watch from a distance. Two radio signals are used for safety, which are the only external controls allowed. One signal pauses the vehicle, and another signal initiates an emergency stop.
Intel Inside®
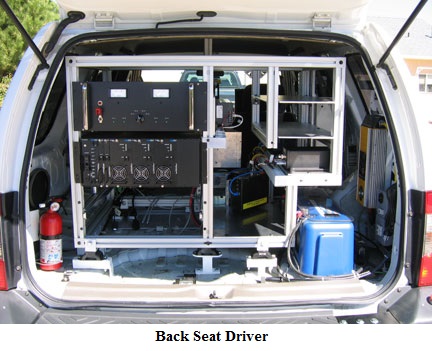
The Team Mojavaton entry, built on a Nissan Xterra SUV platform, is controlled by an industrial rack-mounted PC powered by an Intel dual-core micro-processor and a fault-tolerant disk array. The PC communicates via RS232, Firewire and Ethernet to several subsystems. These subsystems include LASER range finders (LIDAR), a stereo vision system, GPS navigation system, and a military grade Inertial Navigation Unit (INU). In addition to the custom control software, mostly written in C++, the PC is running Entivity Studio, a PC-based logic controller from AutomationDirect.
Entivity Studio allows input from, and control of, devices connected to a DL205 PLC I/O rack. Entivity handles all of the discrete I/O for the vehicle, including required safety features such as the siren, beacon and directional signals. The direction signals are new for this year’s Urban Challenge, since Challenge vehicles must obey all traffic laws, including the use of turn signals.
A CTRIO module in the DL205 I/O rack relays velocity data from the car’s speedometer to the microprocessor. This is one of three inputs used by the computer to help determine position, direction, and speed. The GPS navigation system can provide extremely accurate position and velocity data when it is in contact with at least three geostationary satellites, but tall buildings and tunnels can obstruct the GPS system. Team Mojavaton uses the velocity data from the speedometer, in conjunction with the Inertial Navigation Unit (INU), to augment the GPS and to determine the position and speed of the car even when GPS data is not available.
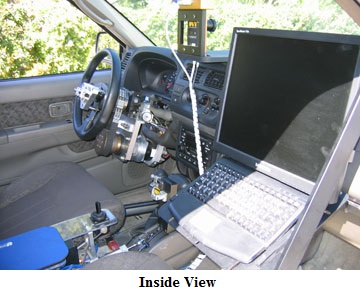
Entivity Studio application software also supplies the position commands to four closed-loop stepper systems. The stepper systems are used to control the throttle, steering, and braking, as well as to rotate a suite of sensors on the roof of the car.
You Are Here!
DARPA provides the teams with two types of map data for the vehicle to use in planning its path: the Route Network Definition File (RNDF) and the Mission Data File (MDF).
The RNDF is defined as the overall set of roadways and areas where the vehicles might travel. It also provides information such as waypoints, stop sign locations, road and lane widths, speed limits, checkpoint locations, and parking locations. In addition to the road segments, there are “free travel” zones, where only a perimeter is defined. This route network does not contain any starting point, ending point, or specific path-of-travel information, and it is provided to the teams 24 hours prior to the start of the event.
The MDF is a series of checkpoints that must be visited in sequence by the autonomous vehicle. A checkpoint is a two dimensional point on the earth specified by latitude and longitude. The MDF will be provided to the team only three minutes before the start of the race.
The exact path that a vehicle should travel is not specified by either the RNDF or the MDF. The control system, given the two separate files, is expected to be able to plan a suitable path.
To further challenge the teams, DARPA has warned that the route network may have road segments that are sparsely defined, with missing information such as lane width and speed limits. Road segments provided in the RNDF might even be blocked. The vehicle must be able to interpret and adapt to these “real-world” conditions.
Cross-Town Traffic
Jim Crittenden, leader of Team Mojavaton, spoke to Automation Notebook about the challenges that are unique to the urban setting.
“In the 2005 race, our vehicle had to navigate between waypoints and across rugged terrain, but all of the obstacles were stationary. Even when we overtook a vehicle that had started ahead of us, the DARPA officials would pause that vehicle by bringing it to a stop, which allowed us to pass it as yet another stationary object. This year, we’ll have to track not only our own position, direction, and speed, but we’ll have to be able to track other moving objects as well.”
But just how many objects must they be able to track? DARPA has not quantified this particular aspect any further, but has hinted that multiple autonomous vehicles may be on the same course at the same time. DARPA has also announced that there may be additional vehicles on the course being manned with “professional drivers”.
Vehicles must demonstrate their ability to deal with oncoming traffic, and interact with other vehicles at stop signs and traffic circles. The vehicles will even be expected to “merge” into traffic, given a reasonable “gap” and taking into account the speed of the traffic flow.
Another obstacle that the teams will face this year is a road block. DARPA has stipulated that the vehicles be capable of a U-turn, but the logistical challenge of a blocked road is much more complex than simply turning around. The vehicle must be able to determine an appropriate re-route based on the available roads and still make it to the next checkpoint in the sequence.
Finally, DARPA plans to challenge the teams with sparse waypoints and reduced accuracy waypoints. In both cases the vehicles will have to use their on-board systems to identify, compensate and adapt to the surroundings.
Second Chance for Mojavaton
Most teams didn’t expect DARPA to continue with the Grand Challenge program after the success of the 2005 event, but at least for Team Mojavaton, it’s a welcome second chance. Crittenden says enthusiastically, “We had a great vehicle last time out. The component that failed had been a part of the car for over a year and had never given us any trouble, so its failure was unexpected.”
He states, “This year we’re starting with a proven platform that’s mechanically complete and we have all year to perfect the software algorithms. Between the tracking of other vehicles, following the rules of the road, and the DARPA roadblocks, our programmers will be busy in 2007. That’s what makes it a challenge”
Good luck, Team Mojavaton!
As we go to press, DARPA has officially restored the prize money. Payouts will be $2,000,000 for first place, the $1,000,000 for second place, and the $500K for third place. Team Mojavaton is very pleased. “I think that $3.5 million in prize money helps to convey the high regard in which our government holds this project and the importance of its success to America.” declares Crittenden.
Through the Looking Glass
![]()
Additional information about the Urban Challenge is available at the official DARPA web site:http://www.darpa.mil/grandchallenge
 This includes the complete set of rules; sample RNDF and MDF files, as well as information about the previous Challenges with full results and photos.
This includes the complete set of rules; sample RNDF and MDF files, as well as information about the previous Challenges with full results and photos.
By Chip McDaniel,
AutomationDirect
Originally Published: Dec. 1, 2007