UCalgary Racing has been using the Gefran PZ12-A-0050-L for the past 3 years to measure the suspension travel of the car. The potentiometers provide data that enable the team to understand and study the behavior of the vehicle at any given moment. It provides information that when analyzed, reveals how the car responds to road and driver input such as:
- The roll stiffness of the front and rear suspension under cornering
- The heave stiffness under high downforce
- Pitch under braking and acceleration
- Dynamic stiffness from dampers under transient conditions
- Corresponding loads that are exhibited by each tire
- Damping ratio when the car oscillates with bump, steering, brake, and throttle inputs
These are only some ways that potentiometers provide vital data that helps the team validate and fine-tune the vehicle’s design from theory to real-world applications. This year our team is making the transition from an internal combustion drivetrain to an electric and this requires our car to undergo the Rain Test where the car is sprayed with water to ensure that all high voltage circuits are protected from water ingress. Because of this, all sensors will need to be water resistant. The IP67 rating of the Alliance Sensors LRE19-075R-00-10A not only complies with this rule but increases the safety and reliability of our electrical system in adverse conditions. The previous vehicle encountered sensor malfunction due to water damage during wet weather conditions. The LRE19… will ensure that regardless of the conditions, we will always have suspension travel data. Additionally, we plan to also use one to start tracking steering angle. The important part of logging our steering angle is being able to validate how the vehicle behaves with steering input such as slip angle and balance. Knowing the steering angle lets us identify how much slip angle our tires can generate based on the difference between our geometric turning radius from steering and the actual turning radius the car exhibits.

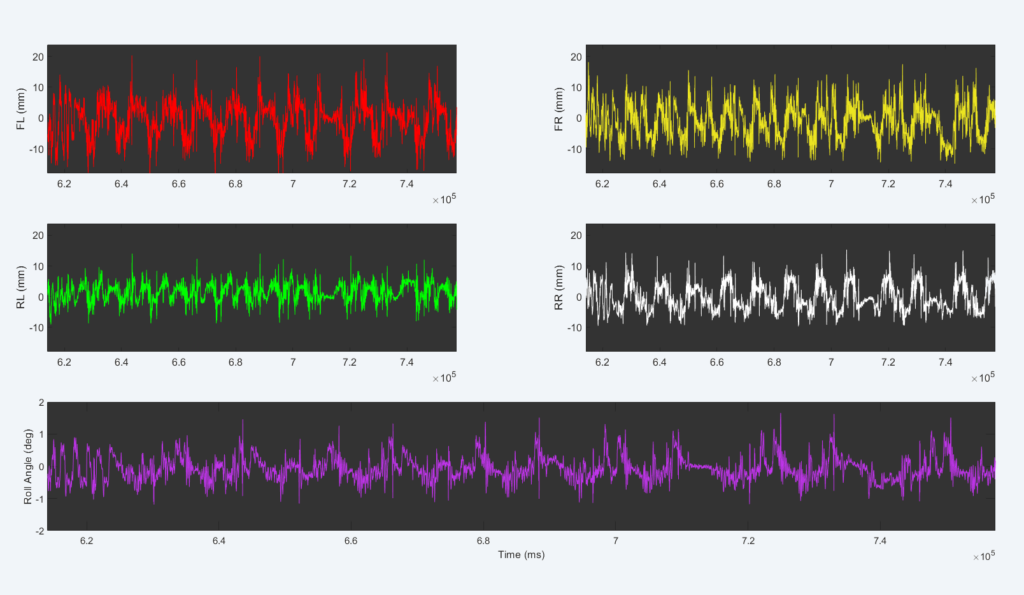
Additionally, using that information, we can then identify scenarios when the vehicle either exhibits too much or too little yaw moment – the balance of the vehicle. For a given slip angle, lateral acceleration, and turning radius, there should be a corresponding steering angle based on the data collected from above. The deviation of actual steering angle reveals whether the vehicle is under or oversteering. Below is a chart that shows potentiometer travel for each corner of the vehicle. That is then used to calculate the roll angle of the vehicle (shown in purple).
Originally Published: Nov 2023