Modern servo and stepper motors and drives—combined with innovations in controllers, communications, and software—have simplified motion control integration and multiplied the possibilities for applying these technologies.
By Joe Kimbrell, AutomationDirect
Early motion control applications developed a (mostly) well-deserved reputation for requiring costly and esoteric components and technologies that are complex to design, install, configure, and maintain. While the subject of motion control may suggest elaborate robotics systems, the fact is that there are many commonplace applications where high-precision control of electrically-driven motors provides an exceptional advantage, but only if the expense and difficulty associated with traditional approaches can be overcome.
In recent years, the field of industrial motion control has undergone a dramatic transformation on several fronts. Servo motors, drives, and controllers have decreased in price, while gaining processing capabilities that ease configuration. Stepper motors and associated components, which are lower-priced than servos, have improved and can effectively work in many applications formerly limited to servos. Finally, Ethernet-based communications media and protocols have streamlined installations and usability.
Technologies once requiring deep expertise in many areas of automation have now moved out of the domain of specialists and are widely accessible to designers and engineers across all industries. This article discusses some advancements that are empowering end users, systems integrators, and original equipment manufacturers to apply reliable and cost-effective motion control for their projects and products.
Legacy motion control
Typical motion control implementations incorporate one or more servo motors, each powered by its own servo drive. Encoders located on each motor, and often on other portions of the driven equipment, provide feedback. A supervisory motion controller connects with all these elements to monitor and command operation with high-speed and high-accuracy closed-loop control of position, velocity, and torque, according to a software program.
Pre-1980s implementations were hardwired and analog, driving up the design effort and complicating installation, not to mention introducing a greater risk of wiring errors and post-commissioning problems. The possibility of encountering issues also increased as applications scaled to more than just a few related motors. Furthermore, hardwired systems tend to hinder subsequent upgrade and modification efforts.
The development of a standardized serial real-time communication system (SERCOS) interface, released in the early 1990s and improved thereafter, provided a digital connectivity option promising better overall performance. By replacing pulse/frequency signals with digital communications it became possible to transfer extended command information to the servo and return a lot more feedback/status information back to the controller. Digital-based motion control connectivity was especially beneficial for large-scale installations with many motors—often dozens of them—working in concert, such as for a printing/packaging line. However, implementing motion control remained a bit of a specialized endeavor.
Modern motion control
In the years since digital-based controllers and communications were first introduced for motion control applications, additional technology improvements have made motion control more economical and mainstream. Following are a few examples.
EtherNet/IP communications
While SERCOS, today running on industrial Ethernet, is still a viable motion control communications protocol, it has been joined by other options. For example, EtherNet/IP is already well-known to many engineers who use it for integration of input/output (I/O), variable frequency drives (VFDs), and other industrial automation devices. This protocol also provides sufficient responsiveness for certain straightforward motion control applications (Figure 1). Because the protocol works over familiar Ethernet media, installation is relatively plug-and-play, with wiring and installation effort reduced significantly compared with extensively hardwired systems.
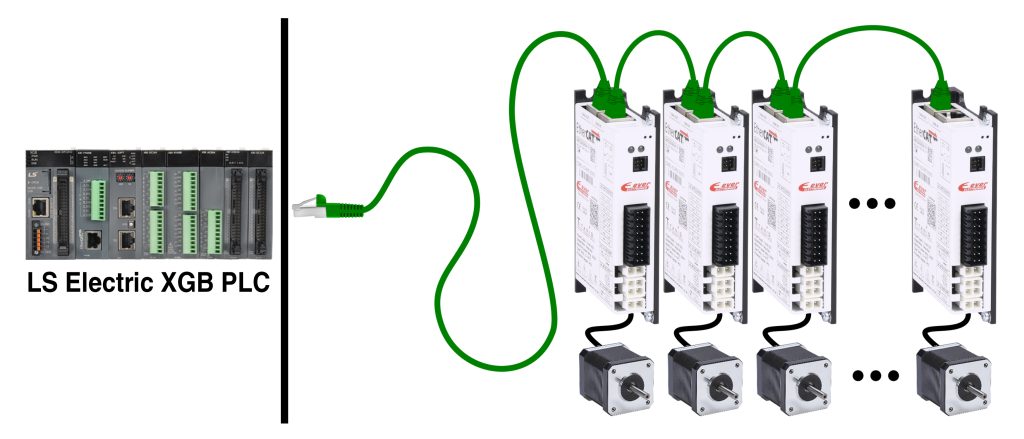
EtherCAT communications
For more demanding applications where deterministic cycle times are essential for maintaining synchronization among devices, the Ethernet for Control Automation Technology (EtherCAT) protocol has become a preferred and popular option. Like EtherNet/IP, EtherCAT is relatively easy to implement, and it is supported by many types of drives and controllers. Other devices, such as encoders and field I/O, are now available with an EtherCAT interface, streamlining motion control designs to use one interconnected communications bus (Figure 2). Many EtherCAT devices incorporate a small two-port switch, so users simply daisy-chain one device to the next using typical industrial Ethernet installation means and methods.

Configuration and diagnostic benefits
Digital communication protocols, in conjunction with configuration files provided by vendors and standardized data formats, simplify the way designers configure, upload/download, and monitor motion control devices. This is especially true for EtherCAT devices. Extensive data gathering and diagnostics help developers commission systems, fine-tune them, and then optimize them in operation.
Improved form factors and integrated functionality
Servo and stepper motors, and the drives and controllers associated with them, have reduced a bit in size and become more modular, making them easier to apply. However, integrated functionality, especially drives with controllers incorporated on board, and even motors with integrated drives/controllers, provides more flexible options for designers and reduces the number of components by combining automation elements.
Stepper motor developments
Stepper motors—so called because they move incrementally in small discrete steps—have long been recognized as a lower-cost and lower-performance option compared to servos, due to speed and torque limitations, and the fact that they are usually operated in an open loop mode. However, the development of high bus voltage stepper variants, the ability to add encoders for closed loop operation, and newer controllers accepting EtherCAT digital communications means that stepper motors are empowering designers to apply effective motion control to more applications than ever before (Figure 3).
PLC-based motion control
Traditionally, motion control applications have often been designed as a dedicated subsystem which must be integrated with a programmable logic controller (PLC) or other host to provide a complete industrial automation solution. However, many modern PLCs incorporate significant motion control capabilities and can take on the role of motion controller while also performing related automation. Even some basic PLCs can control a few axes of coordinated motion using built-in essential instructions for homing, position moves, and velocity moves. Mid-tier and high-performance PLC platforms provide more extensive motion command sets, inter-axis coordination, and larger axis counts, with native EtherCAT connectivity.
Advanced motion functions
Dedicated motion controllers are optimized to coordinate the greatest number of axes through sophisticated movements with superior speed and precision. These types of controllers, and some PLC-based platforms, now take advantage of powerful processors and software to empower users with wizard-like options, pre-built libraries, and graphical interfaces for easily applying advanced strategies. Most any type of motion control system can be created this way, and users may find ready-made functions such as flying shear, random infeed conveyor, and more that exactly handle their application.
Accessible advantages
To some degree, there remains a perception that industrial-grade motion control can only be justified for the most elite applications. However, the reality is that digital control and communication options have evolved so that motion control today is far easier to implement than in the past, and developments with steppers, servos, and PLCs/controllers mean that motion control is realistic even for smaller and cost-constrained applications.
Shortened learning curves and intuitive configuration accelerate implementation and reduce risk, both for new projects and for retrofits. Today’s motion control technologies also fit well with digital transformation initiatives, providing the data needed for industrial internet of things (IIoT) integration with analytics, predictive maintenance, and cloud connectivity platforms.
If you haven’t looked at modern motion control systems lately, it could be a good idea to see what you’ve been missing. And if you need help with design and implementation, knowledgeable vendors stand ready to provide the required assistance.
All images courtesy of AutomationDirect
About the Author

Joe Kimbrell is the Product Manager for Motion Control Products at AutomationDirect. He has over 25 years’ experience with automation, motors, drives, motion control, and servos, and has worked as engineering manager at a packaging OEM and at a multi-axis motion control integration firm. Joe holds a BSEE degree from Georgia Tech.